Ultrasonic Sensor HC-SR04
Overview
This is the HC-SR04 ultrasonic ranging sensor. This economical sensor provides 2cm to 400cm of non-contact measurement functionality with a ranging accuracy that can reach up to 3mm. Each HC-SR04 module includes an ultrasonic transmitter, a receiver and a control circuit.
There are only four pins that you need to worry about on the HC-SR04: VCC (Power), Trig (Trigger), Echo (Receive), and GND (Ground). You will find this sensor very easy to set up and use for your next range-finding project!
How Does it Work?
The ultrasonic sensor uses sonar to determine the distance to an object. Here’s what happens:
- The transmitter (trig pin) sends a signal: a high-frequency sound.
- When the signal finds an object, it is reflected and…
- … the transmitter (echo pin) receives it.
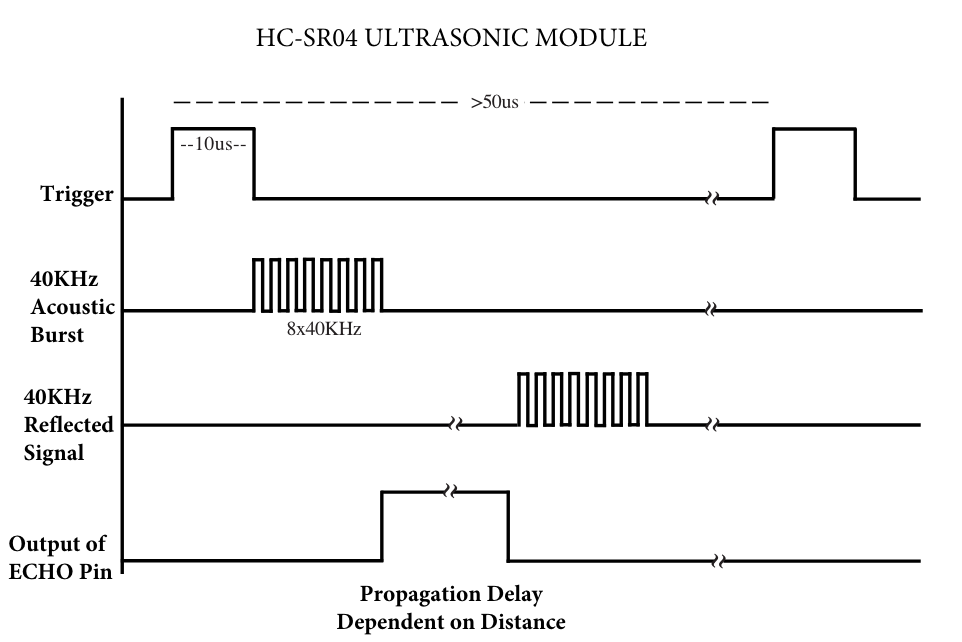
Timing diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object that is pulse width and the range in proportion .You can calculate the range through the time interval betwe en sending trigger signal and receiving echo signal. Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal
Circuit
Hardware
- HC-SR04 Module
- Resistors: 330Ω and 470Ω
- Jumper wire
Wiring
There are four pins on the ultrasound module that are connected to the Raspberry:
- VCC to Pin 2 (VCC)
- GND to Pin 6 (GND)
- TRIG to Pin 12 (GPIO18)
- connect the 330Ω resistor to ECHO. On its end you connect it to Pin 18 (GPIO24) and through a 470Ω resistor you connect it also to Pin6 (GND).
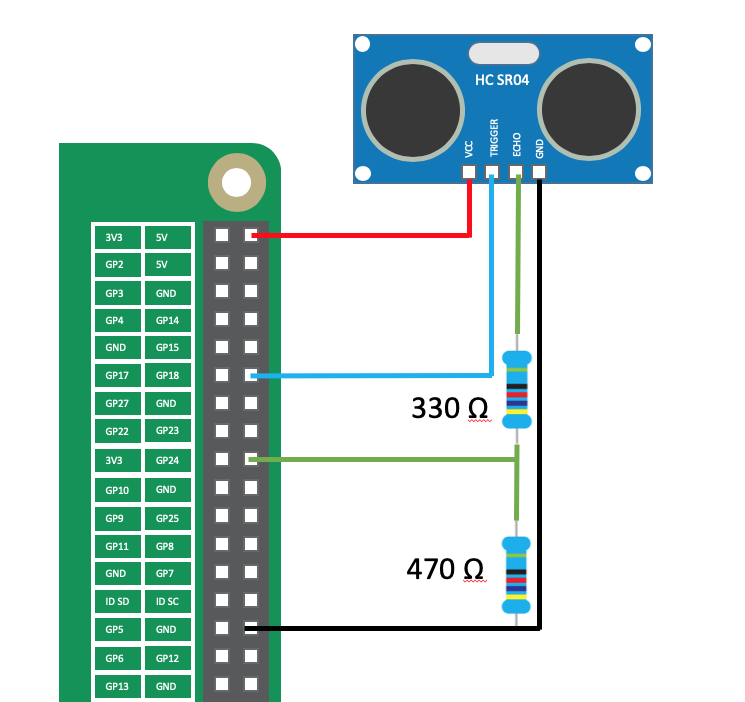
We do this because the GPIO pins only tolerate maximal 3.3V. The connection to GND is to have a obvious signal on GPIO24. If no pulse is sent, the signal is 0 (through the connection with GND), else it is 1. If there would be no connection to GND, the input would be undefined if no signal is sent (randomly 0 or 1), so ambiguous.
Code Sample
# Credits
# https://tutorials-raspberrypi.com/raspberry-pi-ultrasonic-sensor-hc-sr04/
#Libraries
import RPi.GPIO as GPIO
import time
#GPIO Mode (BOARD / BCM)
GPIO.setmode(GPIO.BCM)
#set GPIO Pins
GPIO_TRIGGER = 18
GPIO_ECHO = 24
#set GPIO direction (IN / OUT)
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
def distance():
# set Trigger to HIGH
GPIO.output(GPIO_TRIGGER, True)
# set Trigger after 0.01ms to LOW
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
StartTime = time.time()
StopTime = time.time()
# save StartTime
while GPIO.input(GPIO_ECHO) == 0:
StartTime = time.time()
# save time of arrival
while GPIO.input(GPIO_ECHO) == 1:
StopTime = time.time()
# time difference between start and arrival
TimeElapsed = StopTime - StartTime
# multiply with the sonic speed (34300 cm/s)
# and divide by 2, because there and back
distance = (TimeElapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
while True:
dist = distance()
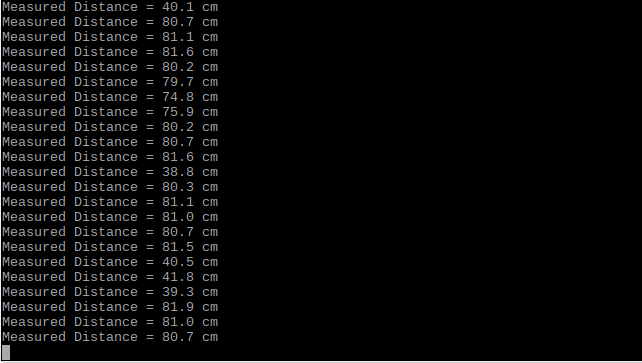
print ("Measured Distance = %.1f cm" % dist)
time.sleep(1)
# Reset by pressing CTRL + C
except KeyboardInterrupt:
print("Measurement stopped by User")
GPIO.cleanup()
and the result
https://tutorials-raspberrypi.com/raspberry-pi-ultrasonic-sensor-hc-sr04/